Nick Hafner

Freelance Roboticist and PhD Candidate.
About me
Hi, thanks for visiting my website. I'm a freelance roboticist living in Osaka, Japan. I am comfortable working on both software, hardware and combinations thereof. I particularly enjoy working on mobile robots with real world useful applications. Let's work together on some amazing projects!
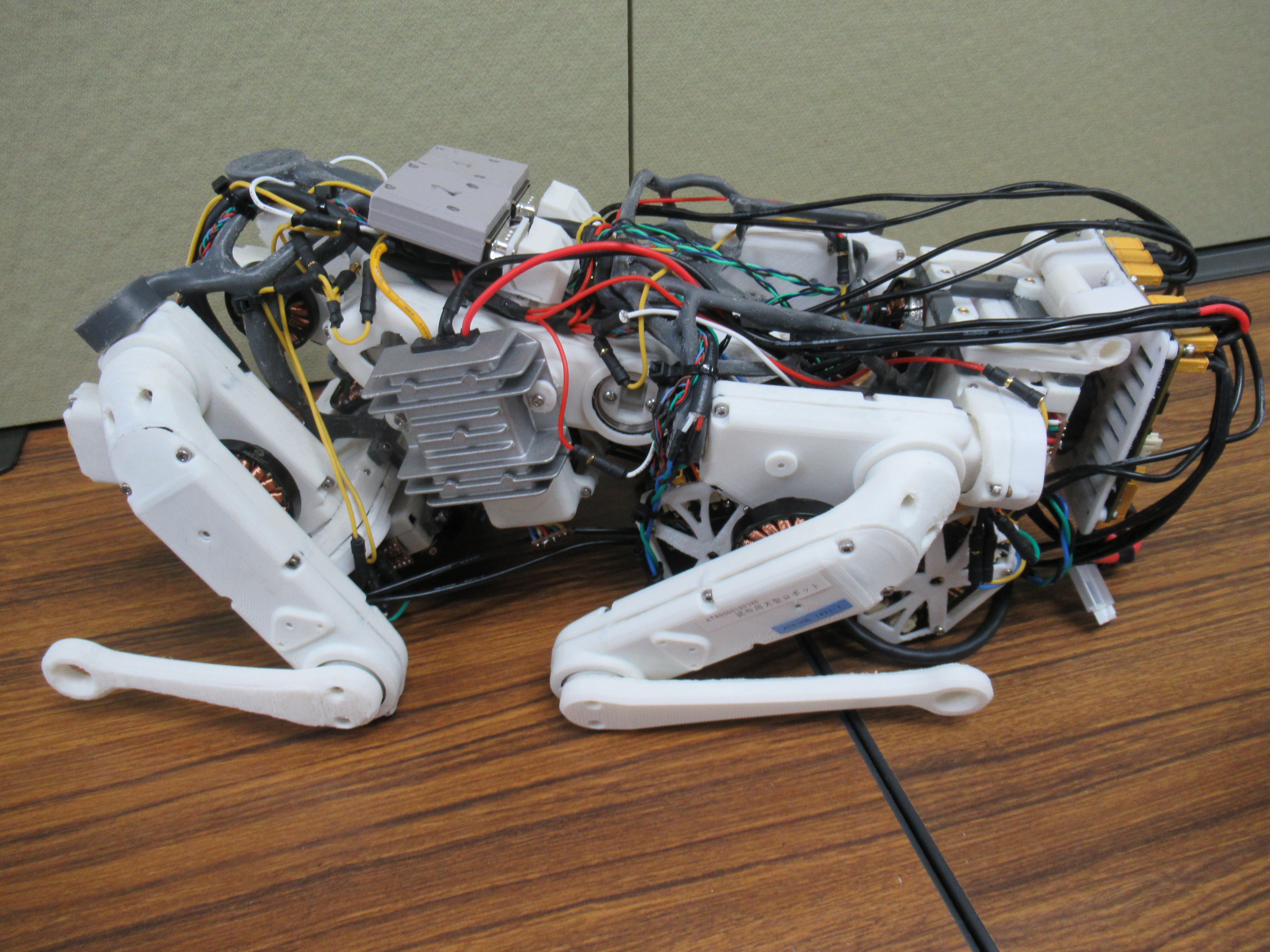
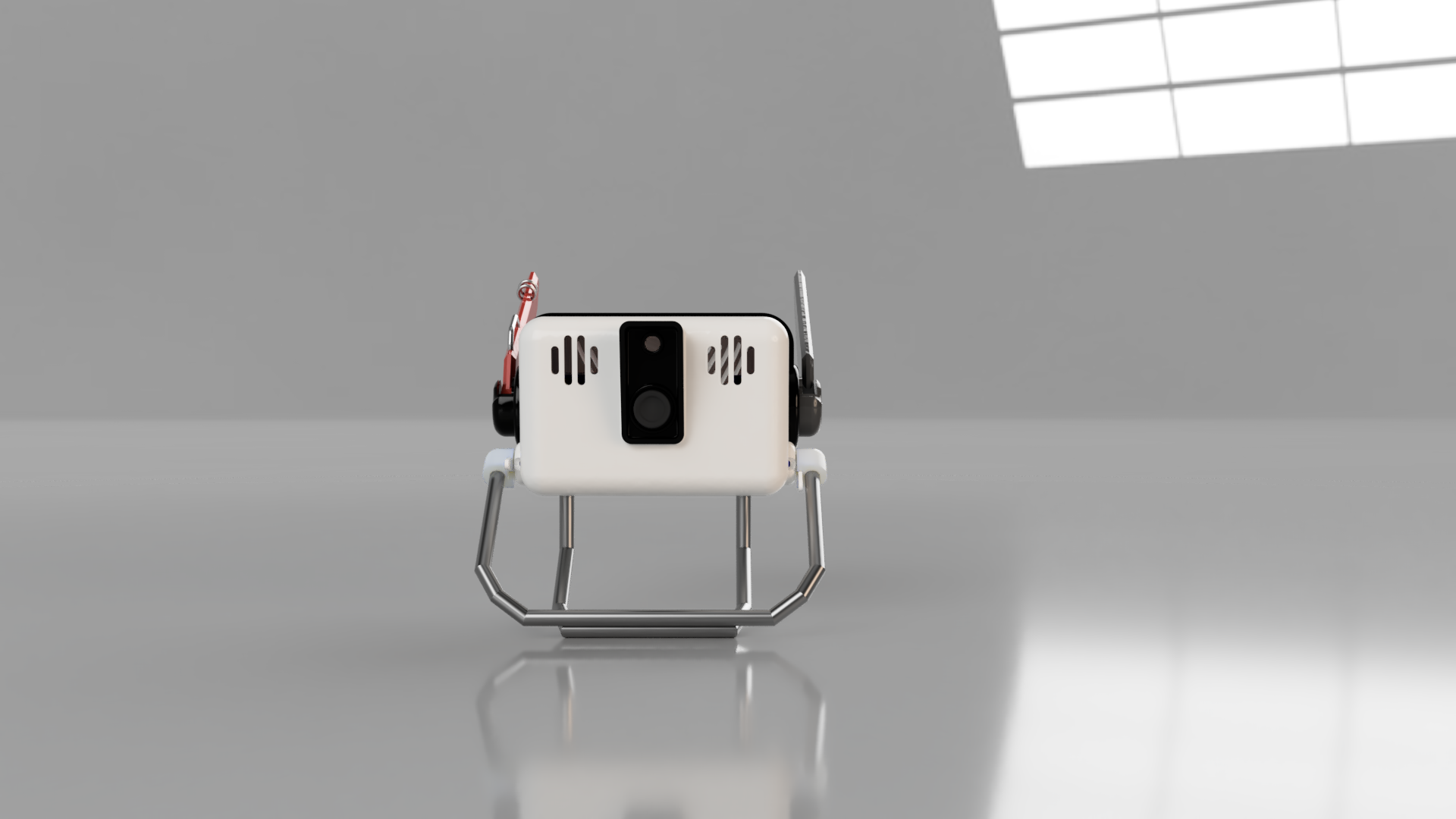
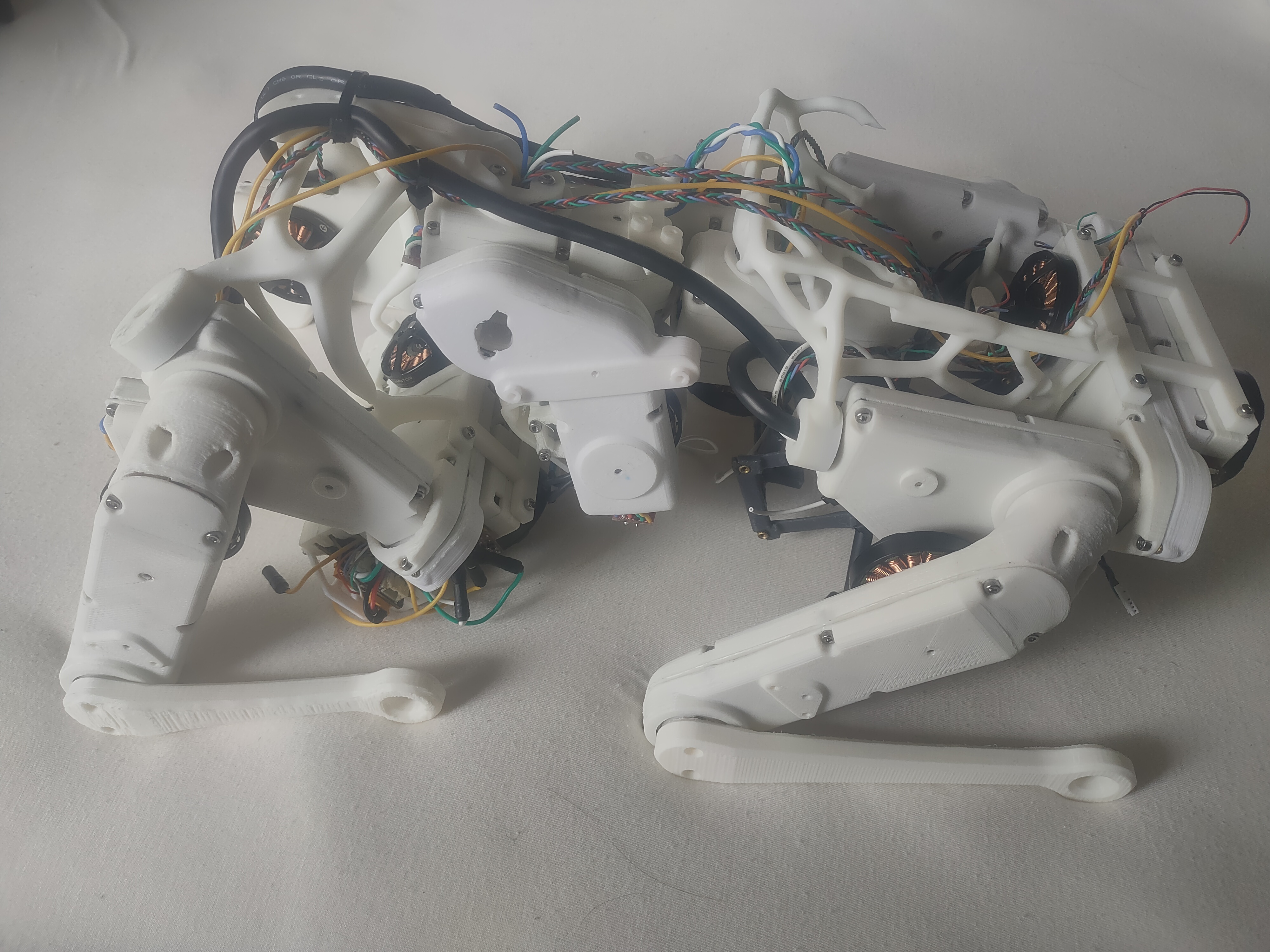
I'm also currently a PhD candidate at Hiroshi Ishiguro Laboratories at Osaka University. My research interests are natural human-robot-interaction and coexistence of humans with truly useful robots. Currently I'm developing a 4-dof spine-enabled quadrupedal robot, and exploring the effect of the spine on gait efficiency and "naturalness".
Finally, when I'm not tinkering with encoders, or training walking gaits, I also like to practice Karate and drum to rock music.
Skillsets
Programming Languages
C++
Python
C/C++ (Embedded)
Javascript
Rust
Robotics
ROS 1
Gazebo
Isaac Gym
Pytorch
OpenCV
CAD
Fusion 360
EAGLE
KiCAD
Rapid Prototyping
Past and Current Projects


Testimonials

Chris Cieslak.Director - BladeBUG
Nick worked with us on a variety of tasks, ranging from a surface detection algorithm using laser scanners, to developing the walking gait of our wind turbine repair robot. He was an absolute pleasure to work with.
Contact Me
Let's get in touch. Send me a message!